3D & CAD
3D and CAD contents

Ingénieur : Informaticien - Automaticien - Infographiste
Spécialités : Interfaces Homme Machine - Réalité Mixte - Serious Gaming - Unity 3D
Mobile : 06 31 10 01 56
E-mail : sebastien.pascault@outlook.com
Team : https://teams.live.com
Skype : live:sebastien.pascault
Présentations :
Passionné du numérique et des environnements simulés, je suis à la recherche constante de savoir-faire et d’innovation.
Ma passion pour l’informatique et l’infographie m’a motivé tout au long de mon cursus et me motive encore aujourd’hui pour continuer ma carrière dans le développement logiciel.
CV :

Ingénieur : Informaticien - Automaticien - Infographiste
Spécialités : Interfaces Homme Machine - Réalité Mixte - Serious Gaming - Unity 3D
Mobile : 06 31 10 01 56
E-mail : sebastien.pascault@outlook.com
Team : https://teams.live.com
Skype : live:sebastien.pascault
Présentations :
Passionné du numérique et des environnements simulés, je suis à la recherche constante de savoir-faire et d’innovation.
Ma passion pour l’informatique et l’infographie m’a motivé tout au long de mon cursus et me motive encore aujourd’hui pour continuer ma carrière dans le développement logiciel.
CV :

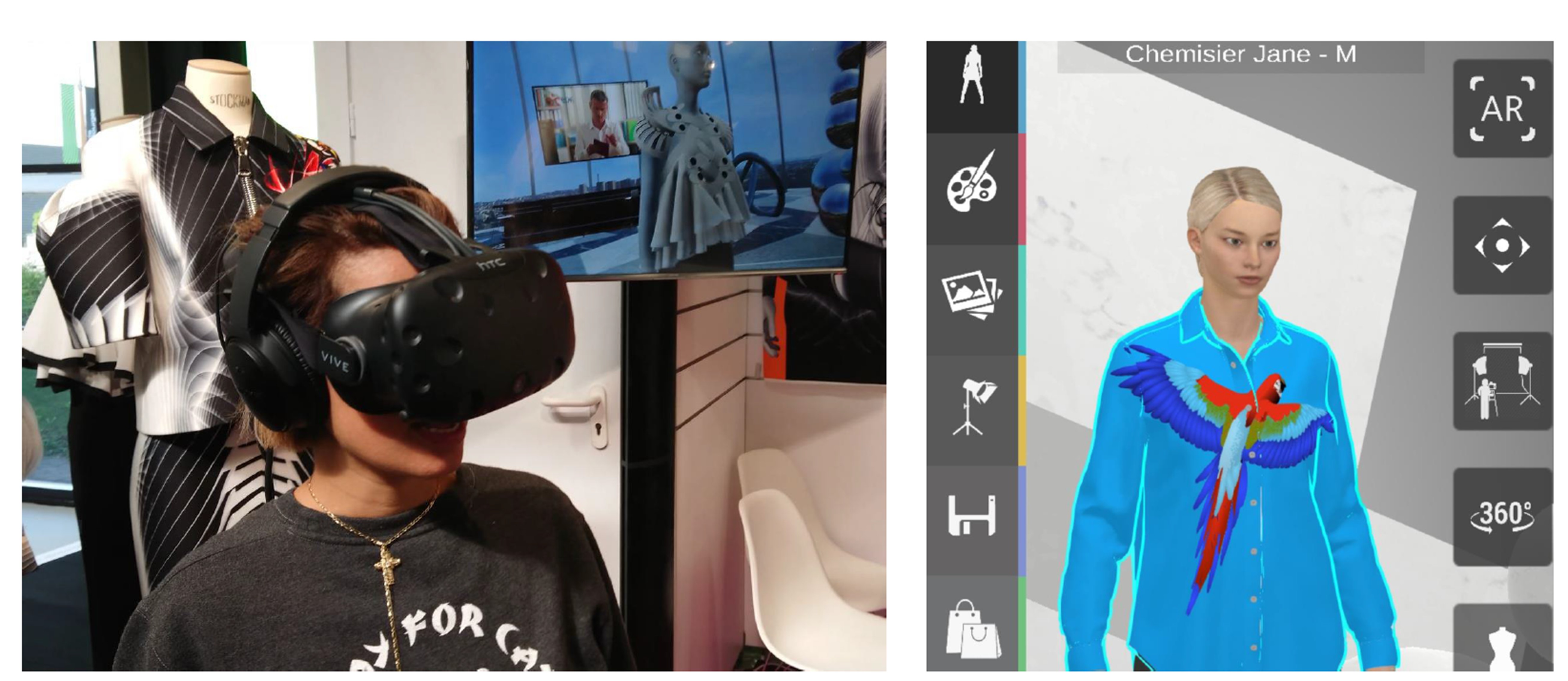
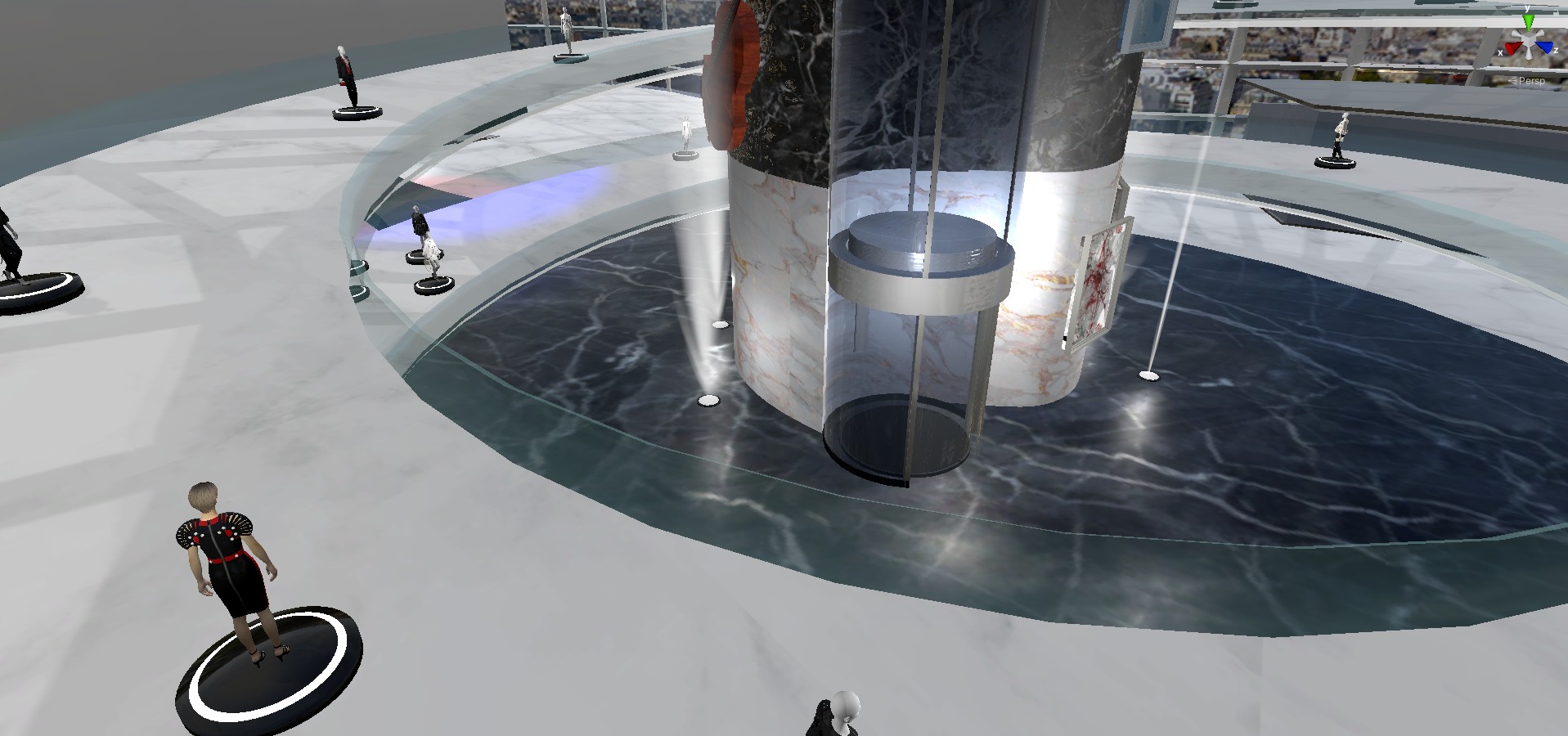
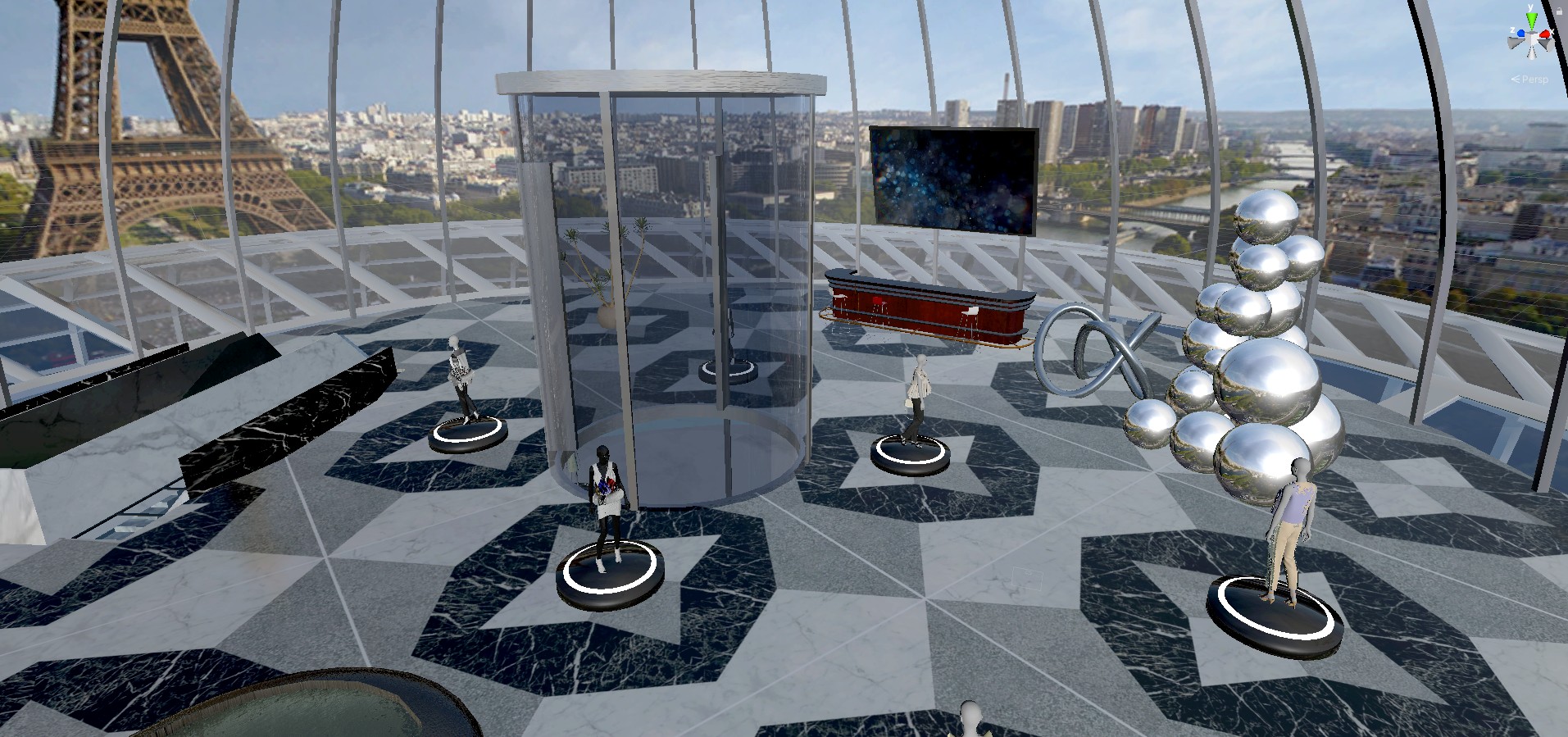
Développement d'un magasin de mode en réalité virtuelle sous Unity 3D. Développement d'une application multiplateforme pour le placement individualisé de motifs sur vêtements 3D.
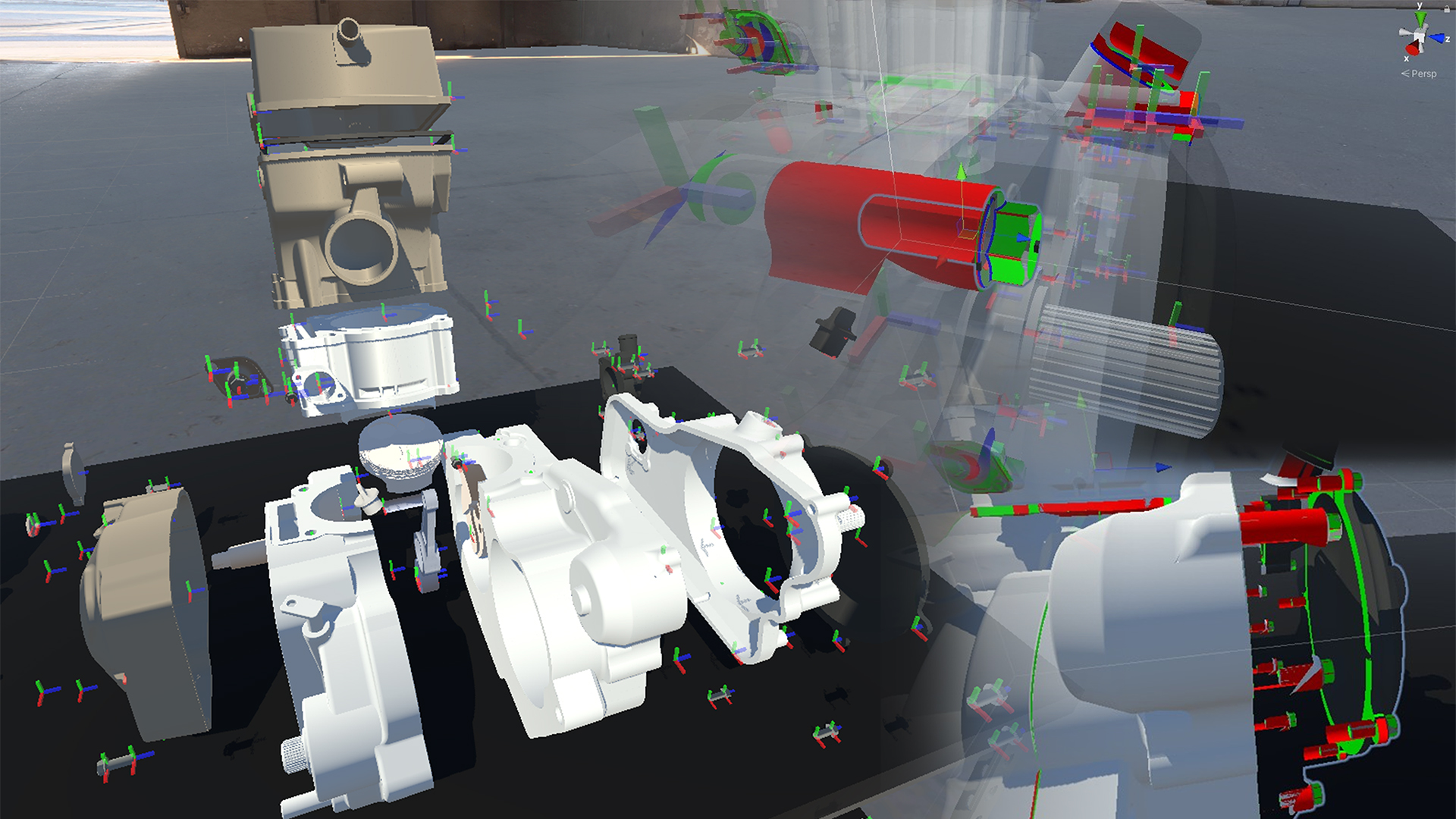
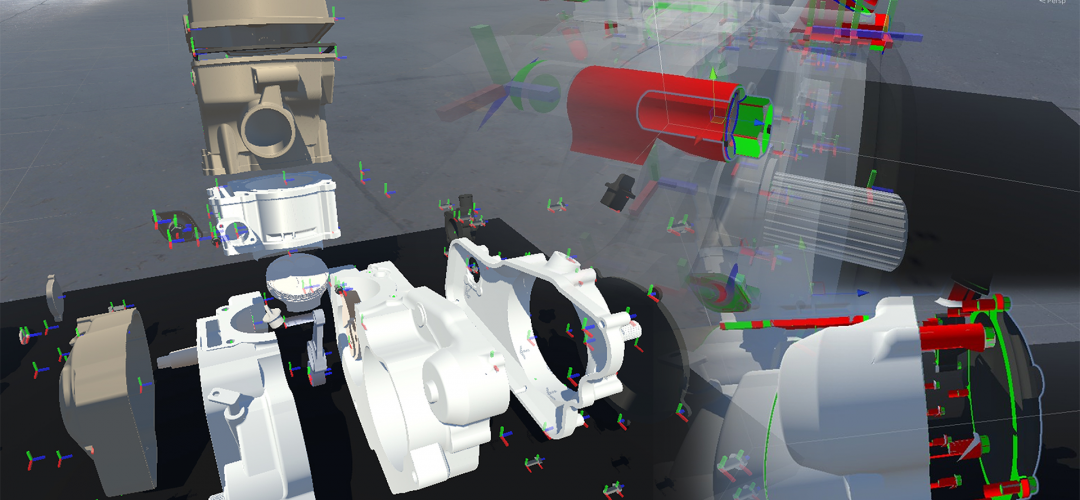
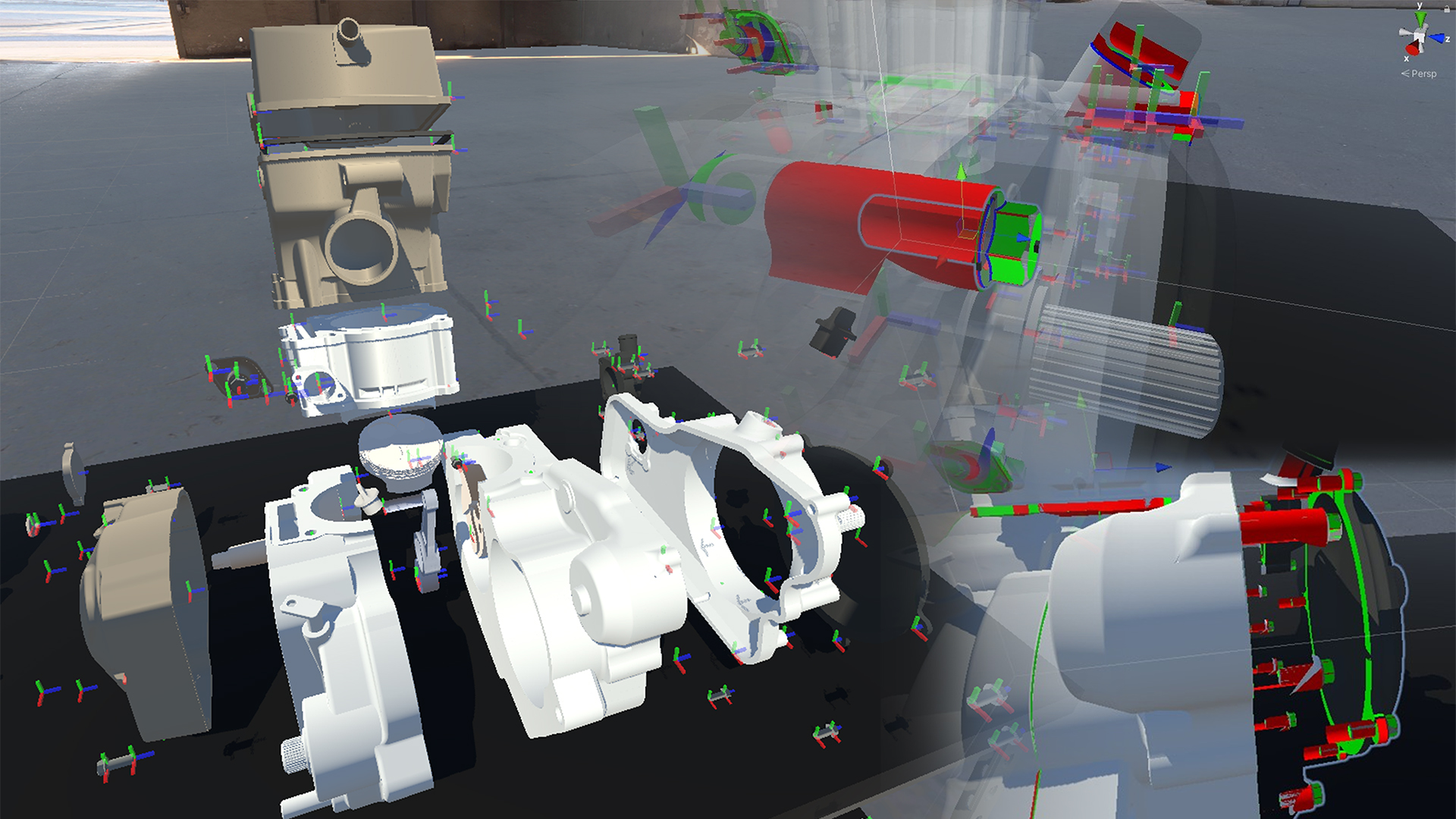
Le projet se concentre sur une nouvelle méthode pour générer et modéliser des caractéristiques sémantiques (liaisons cinématiques notamment) dans les l'assemblage 3D numérique afin d'optimiser le temps de préparation des simulations en réalité virtuelle. L'approche proposée est basée sur un ensemble de règles heuristiques points clés cinématique nommés "KeyPoints" (caractérisations dans l'espace de lien cinématique ou d'un contact) utilisés pour idéaliser un modèle 3D dans un moteur physique. Cette étude identifie à travers un processus de désassemblage un certain nombre de règles sémantiques regroupé. L'approche proposée est basée sur deux étapes : l'extraction des caractéristiques d'assemblage dans un premier temps et l'exploitation de ces caractéristiques par le biais d'un moteur de règles dans un deuxième temps. Dans la première étape, les données B-Rep (représentation géométrique des limites internes d'un objet 3D) et les contraintes d'assemblage sont extraites au moyen d'une API SolidWorks et injectée en entrée d'Unity3D. Dans un deuxième temps, un modèle de règles sémantiques à plusieurs niveaux est utilisé pour identifier et générer de façon automatique les différents KeyPoints dans la scène Unity. Ces keypoint sont ensuite utilisé pour simuler l'ensemble des comportements et des actions attendues. L'approche est démontrée et validée sur un cas d'utilisation avec un scénario de désassemblage et adaptée à la réalité virtuelle.
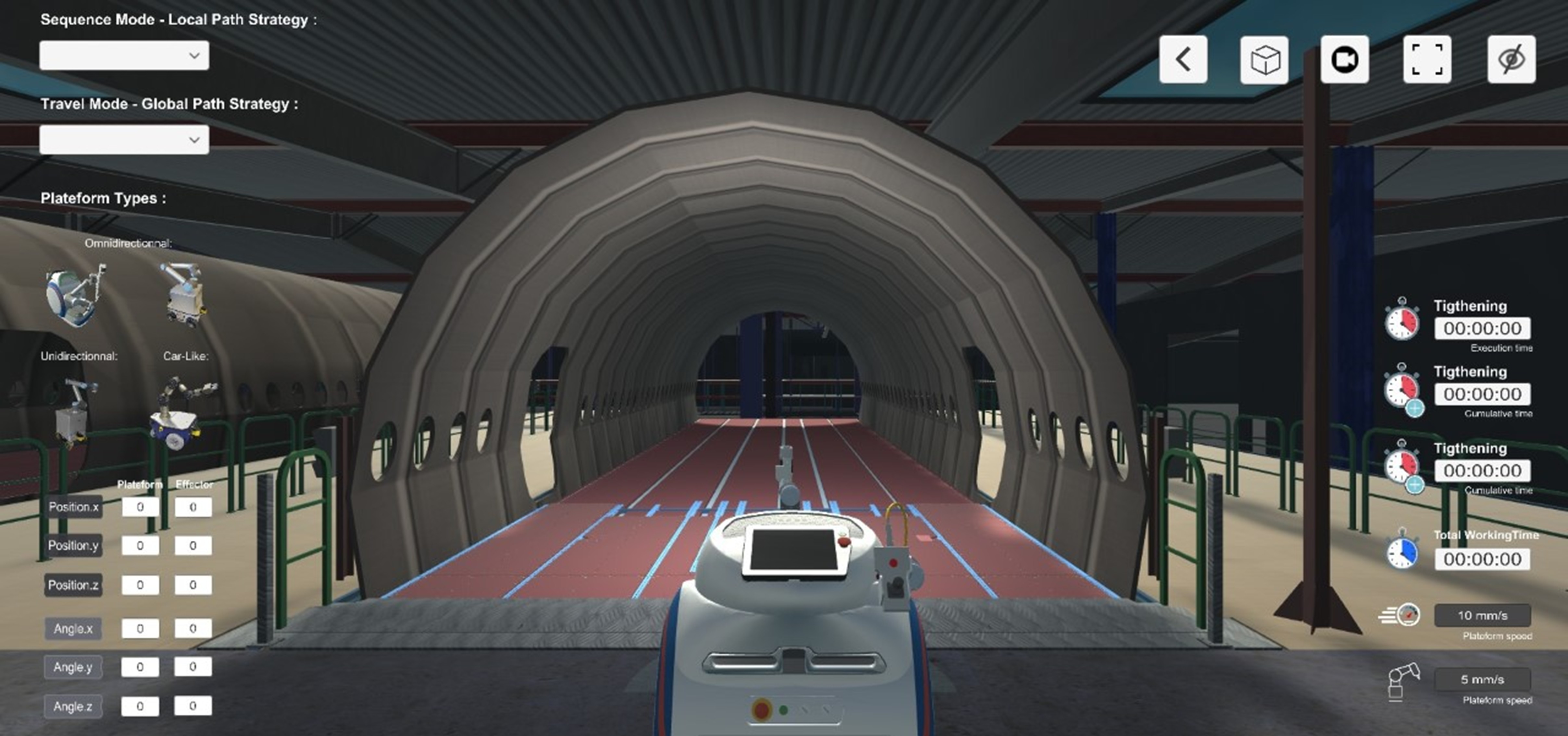
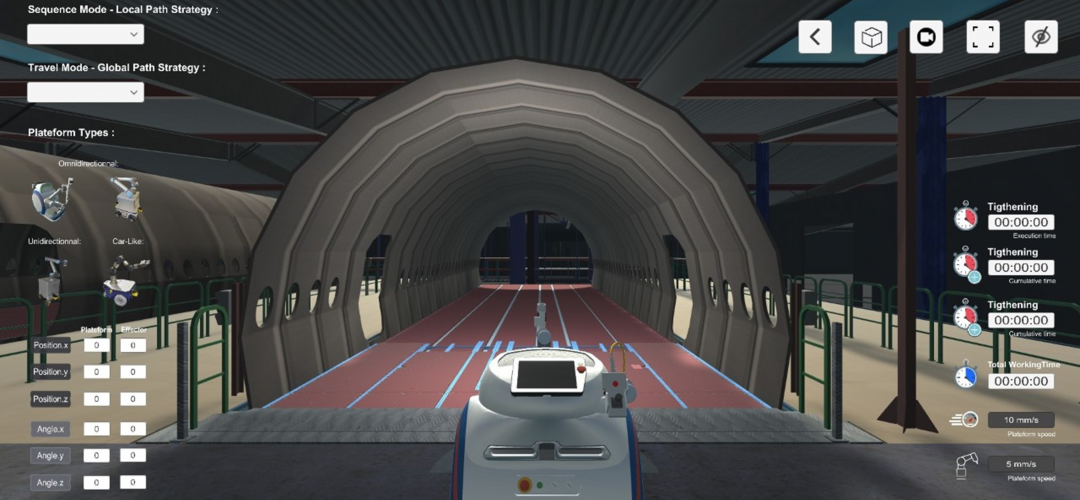
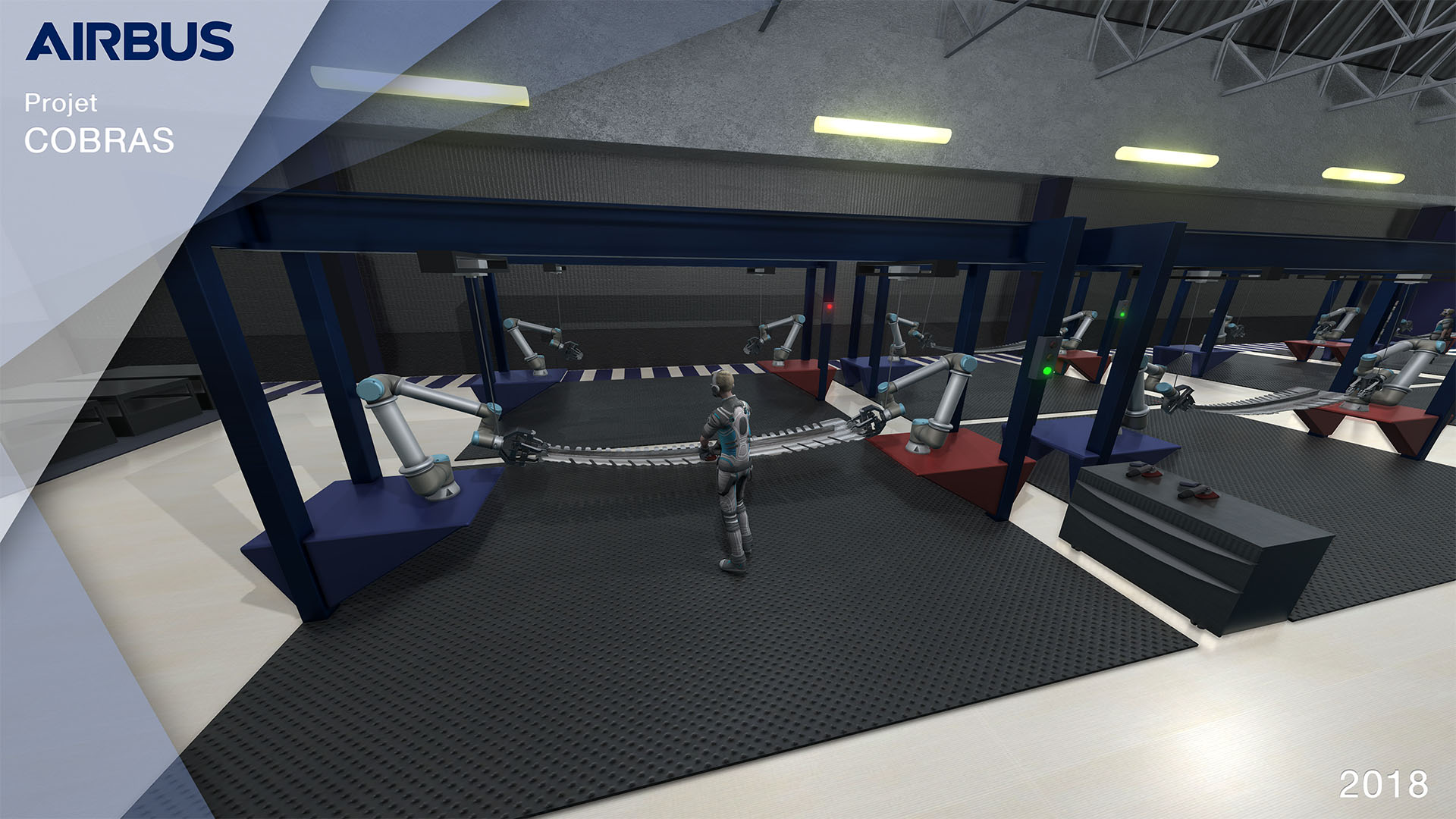
Le projet de recherche proposé ici est le projet CIAO, un projet R&T développé en interne chez Airbus Opération SAS. Il s’agit de mettre en place une plate-forme collaborative pour effectuer des déplacements de façon autonome par l’utilisation de deux scrutateurs laser (radar sick) lui permettant de se localiser et de contourner des obstacles positifs ou négatifs. Cette dernière est équipée d’un bras UR10 sur lequel est implémenté une tête de vissage pneumo-électrique et un système de vision par caméra qui est capable de détecter et repositionner le bras pour la bonne exécution de l’opération de serrage des vis.
L’objectif de ce projet est de contribuer à l’automatisation de l’acquisition et de l’enrichissement des données pour la simulation, de simuler en 3D des trajectoires de robot en fonction des opérations à réaliser et des contraintes liées à son environnement. Ce projet a de plus pour but de simuler en réalité virtuelle la perception des capteurs et le comportement des contrôleurs, de manière à pouvoir définir les réactions telles qu’attendues, suivant différents types d’aléas. Les différentes méthodes de prédictions (machine-learning et deep-learning) permettront l’automatisation de ces comportements, et en particulier pour ceux non identifiés.
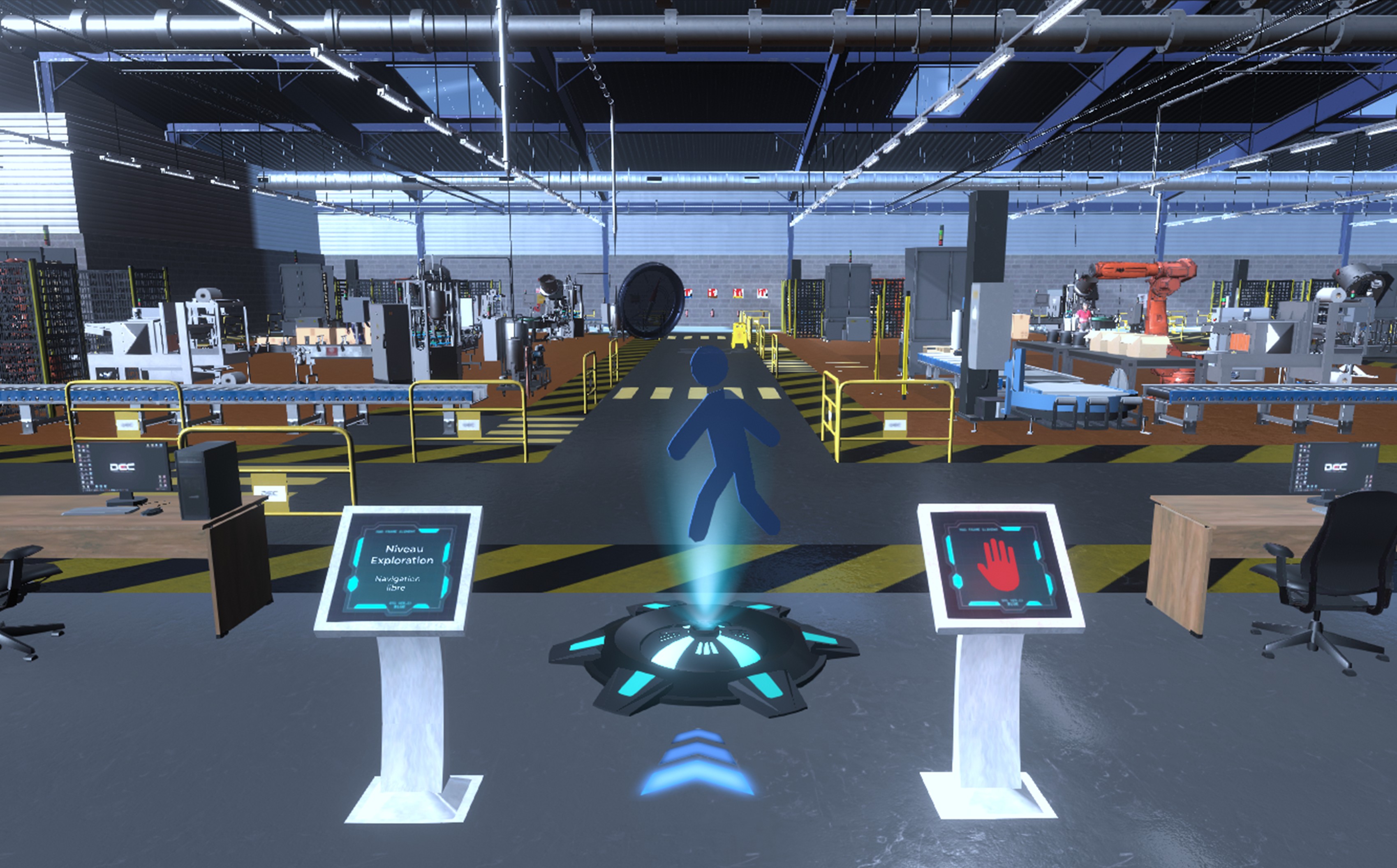
Projet de simulation en réalité virtuelle visant à reproduire les conditions de travail en milieu industriel. L’application Safety Factory est une application pédagogique ayant pour but de sensibiliser l’utilisateur aux problèmes de sécurité. Cette application a été développée sur le moteur graphique Unity 3D et déployé dans un casque de réalité virtuelle Oculus Rift.
3D and CAD contents
Digital drawing content
Description about AI and Neural Network Arts
Copyright © 2025. All rights reserved.