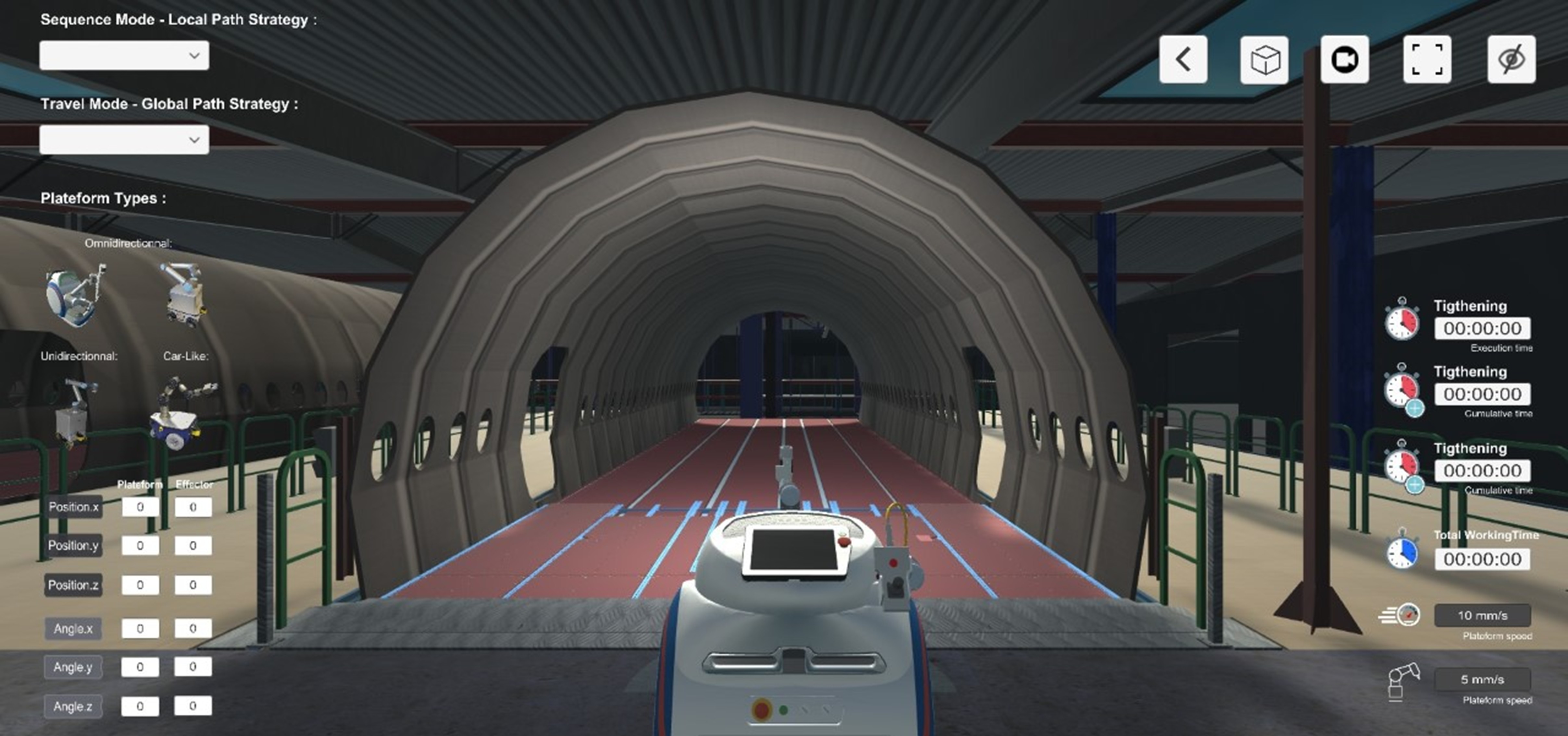
Bei dem hier vorgeschlagenen Forschungsprojekt handelt es sich um das Projekt CIAO, ein intern bei Airbus Opération SAS entwickeltes Forschungs- und Entwicklungsprojekt. Ziel ist es, eine kollaborative Plattform für autonome Bewegungen zu schaffen, die zwei Laserscanner (radarkrank) nutzt, um positive oder negative Hindernisse zu lokalisieren und zu vermeiden. Die Plattform ist mit einem UR10-Arm ausgestattet, auf dem ein pneumo-elektrischer Schraubenkopf und ein kamerabasiertes Bildverarbeitungssystem implementiert sind, das in der Lage ist, den Arm zu erkennen und neu zu positionieren, um sicherzustellen, dass der Schraubvorgang korrekt ausgeführt wird.
Ziel dieses Projekts ist es, zur Automatisierung der Datenerfassung und -anreicherung für die Simulation beizutragen und die Roboterbahnen in 3D in Abhängigkeit von den auszuführenden Operationen und den mit der Umgebung verbundenen Zwängen zu simulieren. Dieses Projekt zielt auch darauf ab, die Wahrnehmung der Sensoren und das Verhalten der Steuerungen in der virtuellen Realität zu simulieren, um die erwarteten Reaktionen auf verschiedene Arten von Gefahren definieren zu können. Die verschiedenen Vorhersagemethoden (maschinelles Lernen und Deep-Learning) werden es ermöglichen, diese Verhaltensweisen zu automatisieren, insbesondere bei nicht identifizierten Verhaltensweisen.