3D & CAD
3D and CAD contents


Sébastien PASCAULT

Engineer: Computer scientist - Automatician - Computer graphics designer
Specialities: Human Machine Interfaces - Mixed Reality - Serious Gaming - Unity 3D
Mobile: 06 31 10 01 56
E-mail: sebastien.pascault@outlook.com
Team: https://teams.live.com
Skype: live:sebastien.pascault
About me:
Passionate about digital technology and simulated environments, I'm constantly looking for innovations and challenges. My passion for IT and computer graphics has motivated me throughout my studies and still motivates me today to continue my career in software development.
Resume:

Sébastien PASCAULT
Engineer: Computer scientist - Automatician - Computer graphics designer
Specialities: Human Machine Interfaces - Mixed Reality - Serious Gaming - Unity 3D
Mobile: 06 31 10 01 56
E-mail: sebastien.pascault@outlook.com
Team: https://teams.live.com
Skype: live:sebastien.pascault
About me:
Passionate about digital technology and simulated environments, I'm constantly looking for innovations and challenges. My passion for IT and computer graphics has motivated me throughout my studies and still motivates me today to continue my career in software development.
Resume:

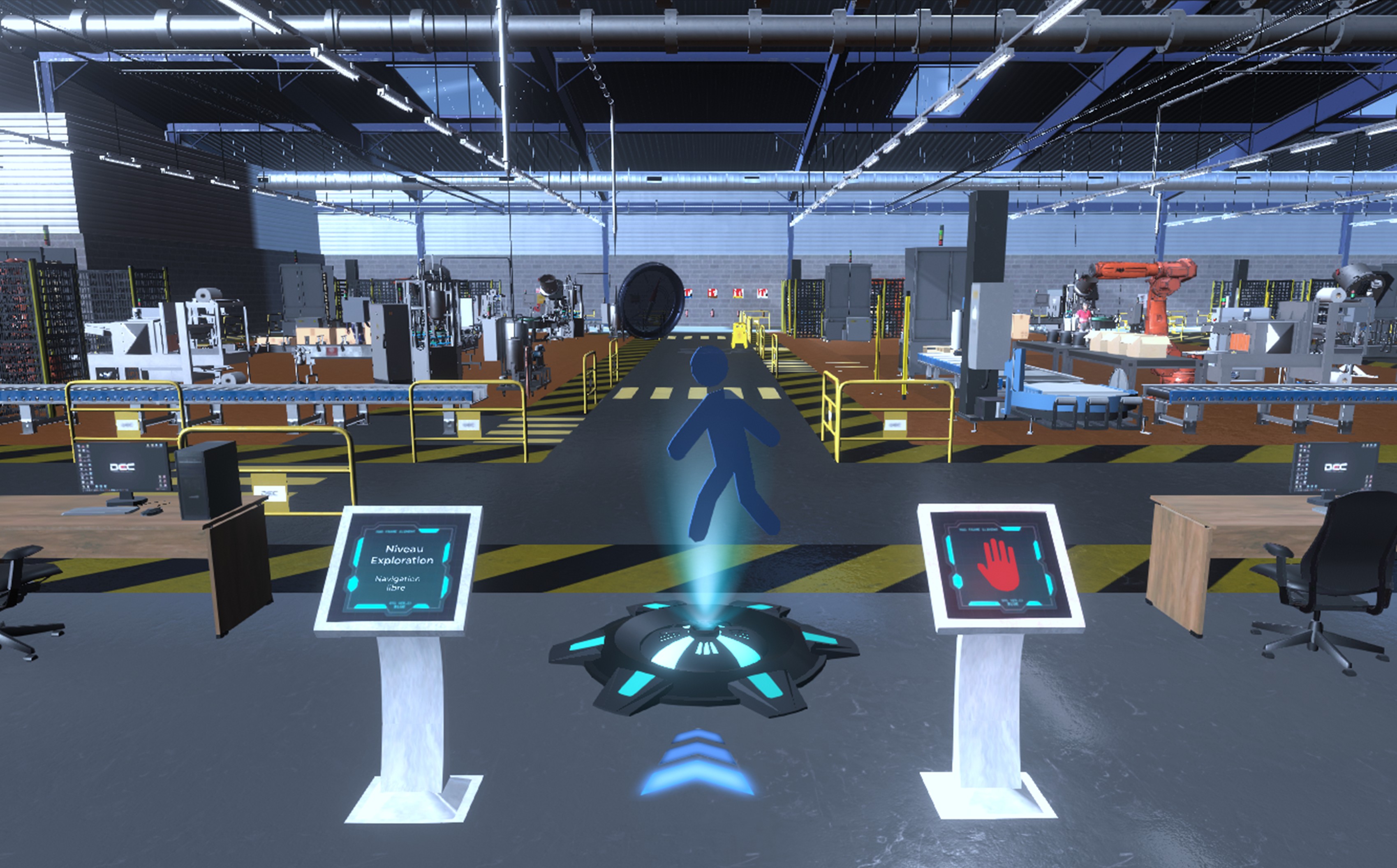
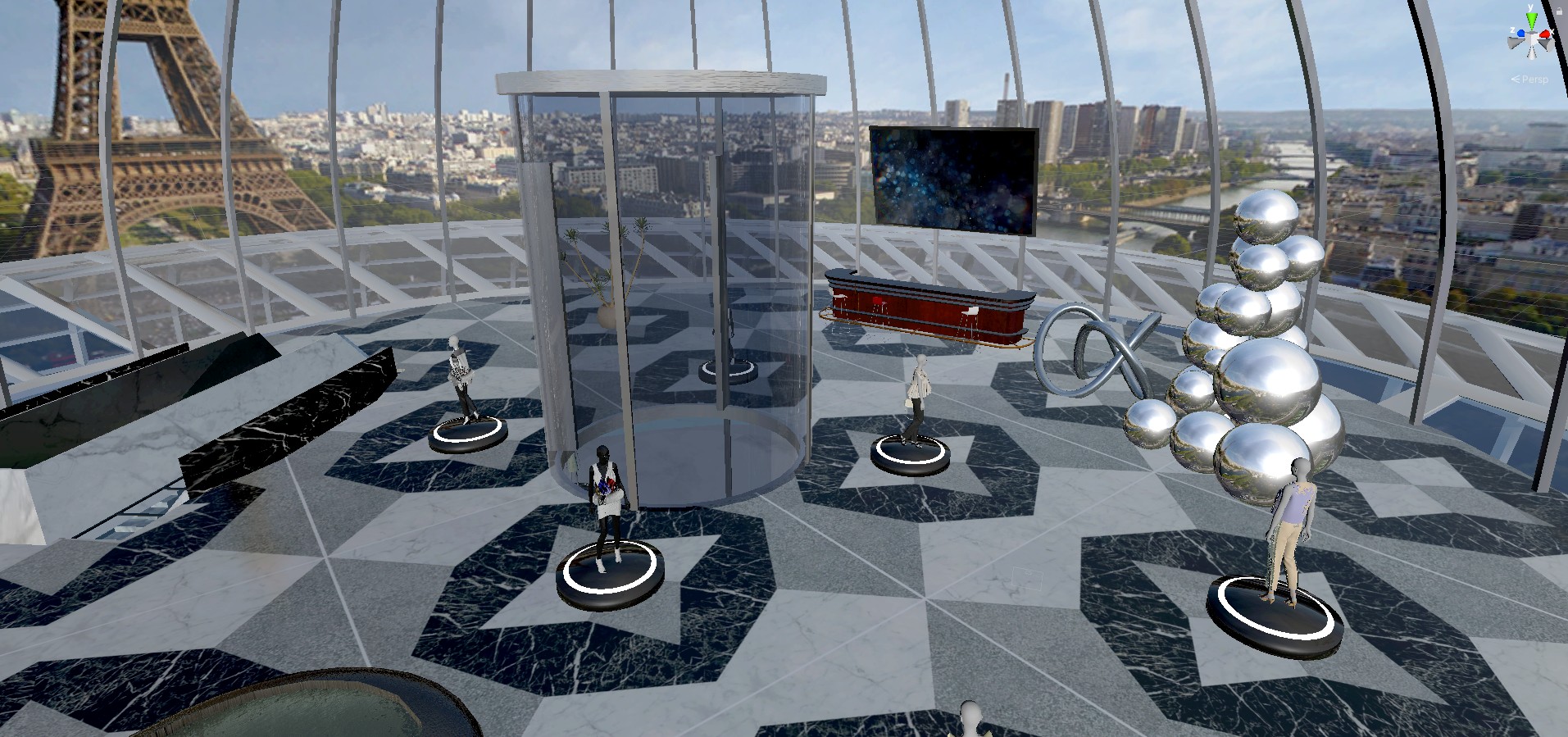
As part of the Modeling, Simulation and Haptic Rendering course, a virtual reality simulation project was proposed by DEC Industrie. DEC Industrie develops educational equipment for professionals, designed to reproduce working conditions in an industrial environment. The company also offers virtual reality training software solutions for students.
The Safety Factory application fits into this context, and aims to raise user awareness of safety issues in industrial environments. It was developed using the Unity 3D graphics engine and deployed exclusively on the Oculus Rift virtual reality headset.
In this report, we'll first look at the multimodal aspects of our application. In the second part, we will analyze the simulation-related elements. We'll then talk more specifically about content and modeling. Finally, we'll describe the different levels and present a user manual.
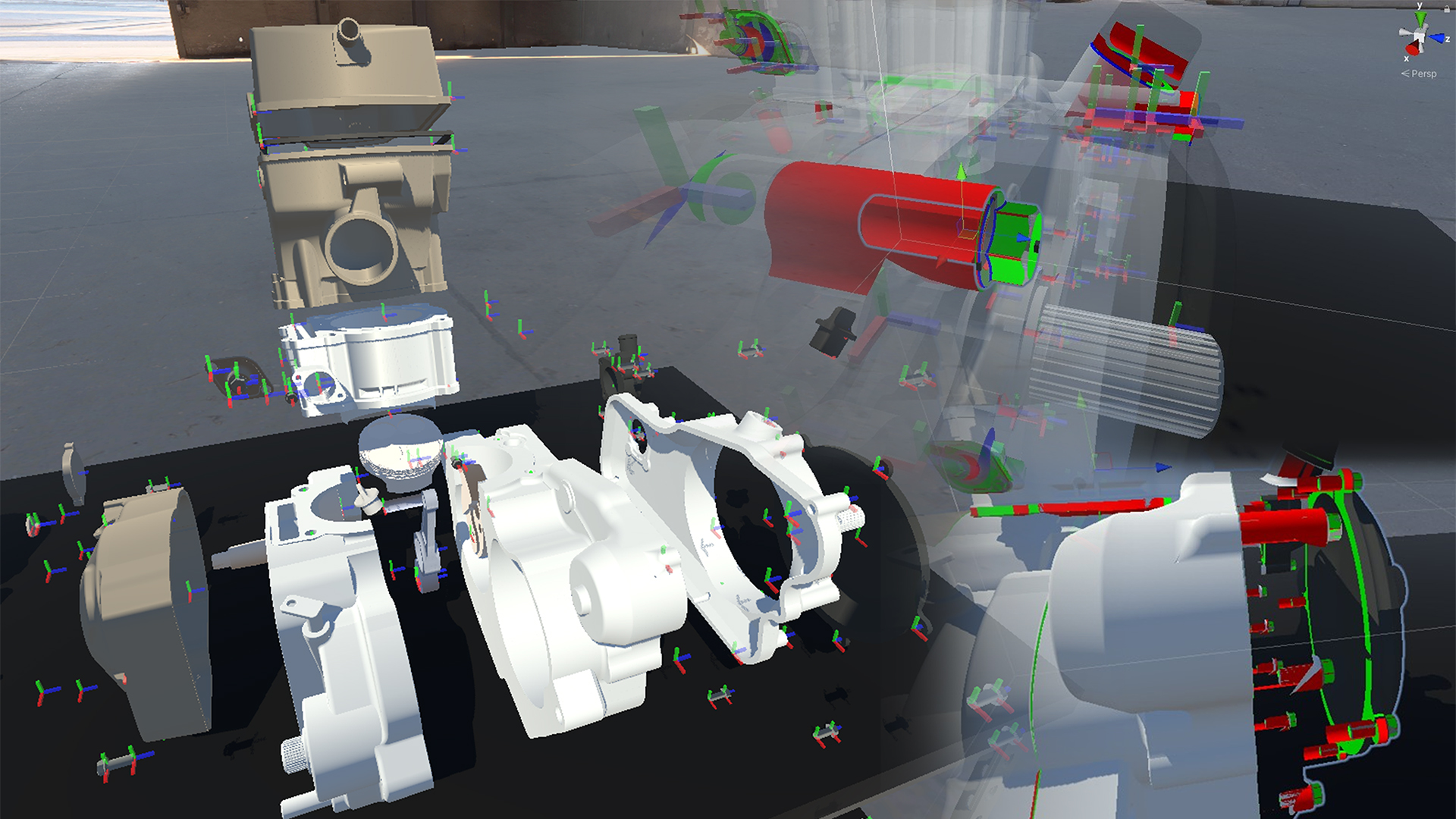
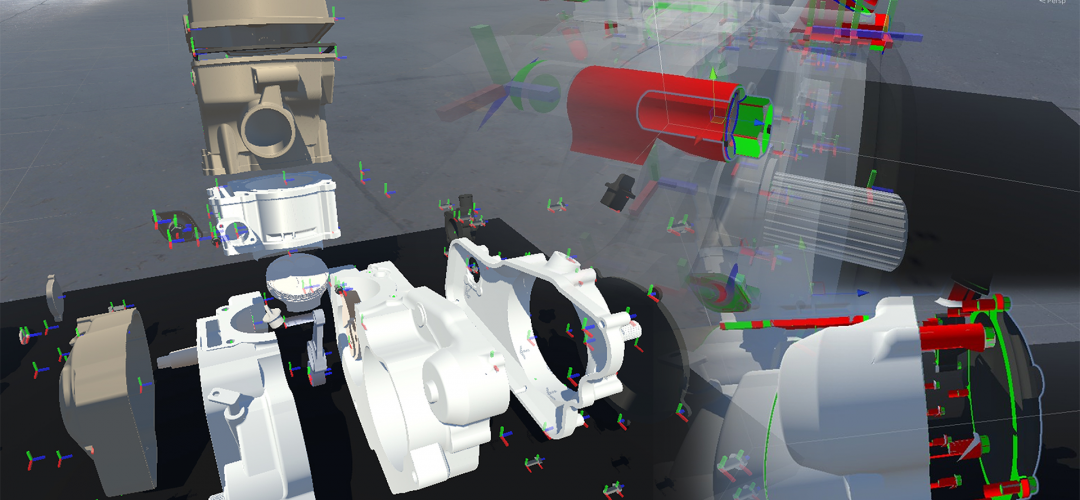
The project focuses on a novel approach to generate and model assembly semantic meaning enclosed in product assembly features in order to optimize the preparation time of Virtual Reality simulations. The proposed approach is based on a set of heuristic rules to generate semantic KeyPoints (characterisation of a kinematic link or a mates) used to idealize an assembly model. This study identifies through a disassembly process a number of semantic rules in order to extract and translate assembly semantic features from CAD models. The proposed approach is based on two steps: features extraction and semantic recognition of the assembly features. In the first step, internal boundary representation (B-Rep) and mate extraction methods are used to retrieve the engineering meaning from assembly models using SolidWorks’ API functions. In the second step, a multilevel semantic rules model is used. The approach is demonstrated and validated on a use-case with a disassembly process scenario and adapted to Virtual Reality
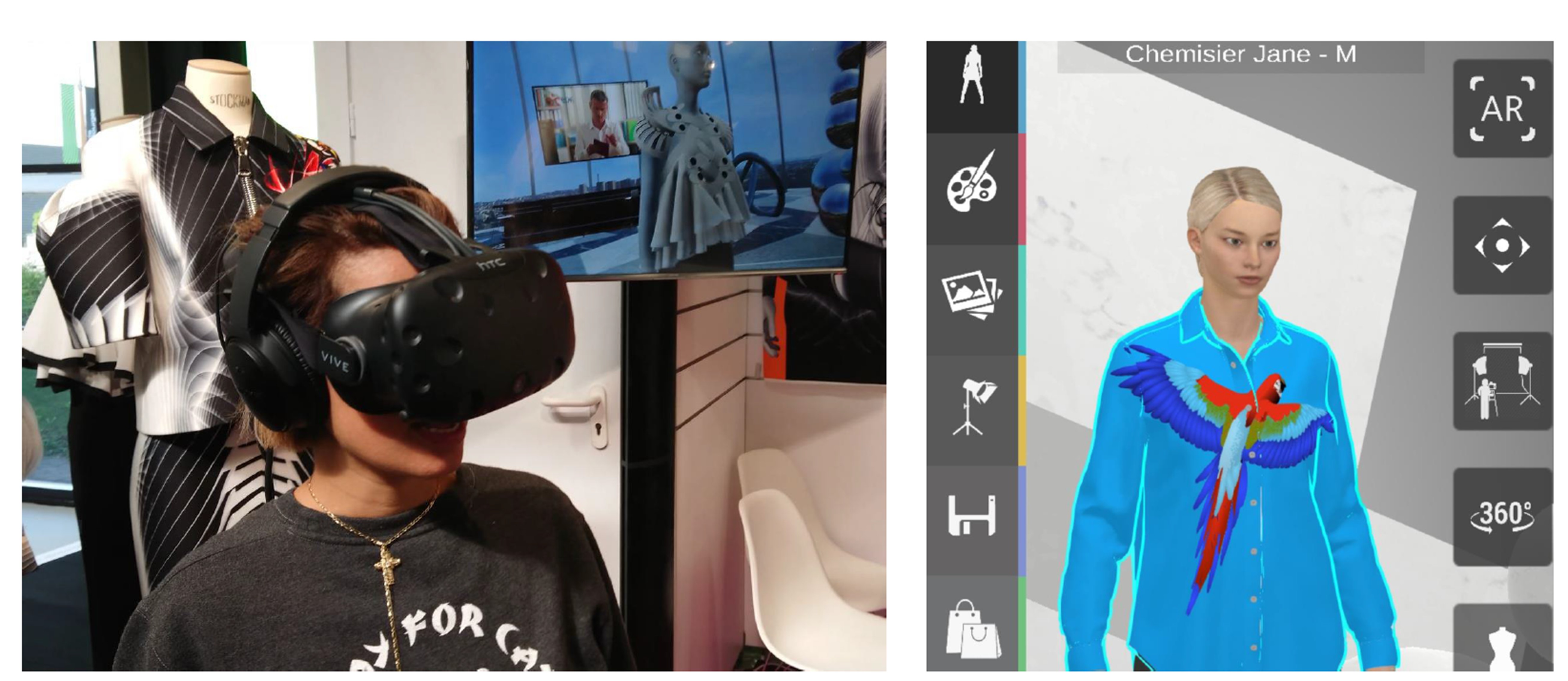
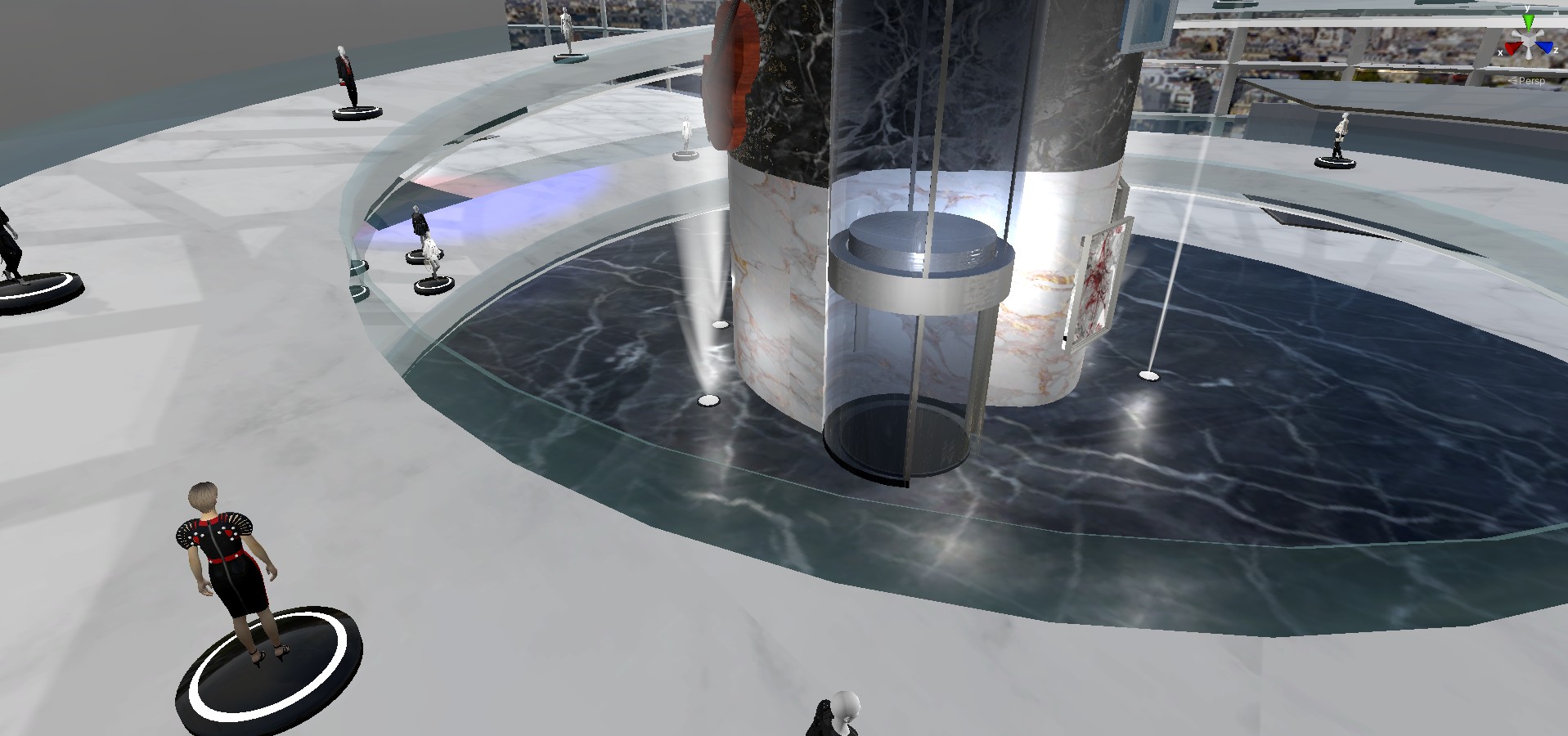
Development of a virtual reality fashion shop using Unity 3D. Development of a cross-platform application for individualised placement of patterns on 3D garments.
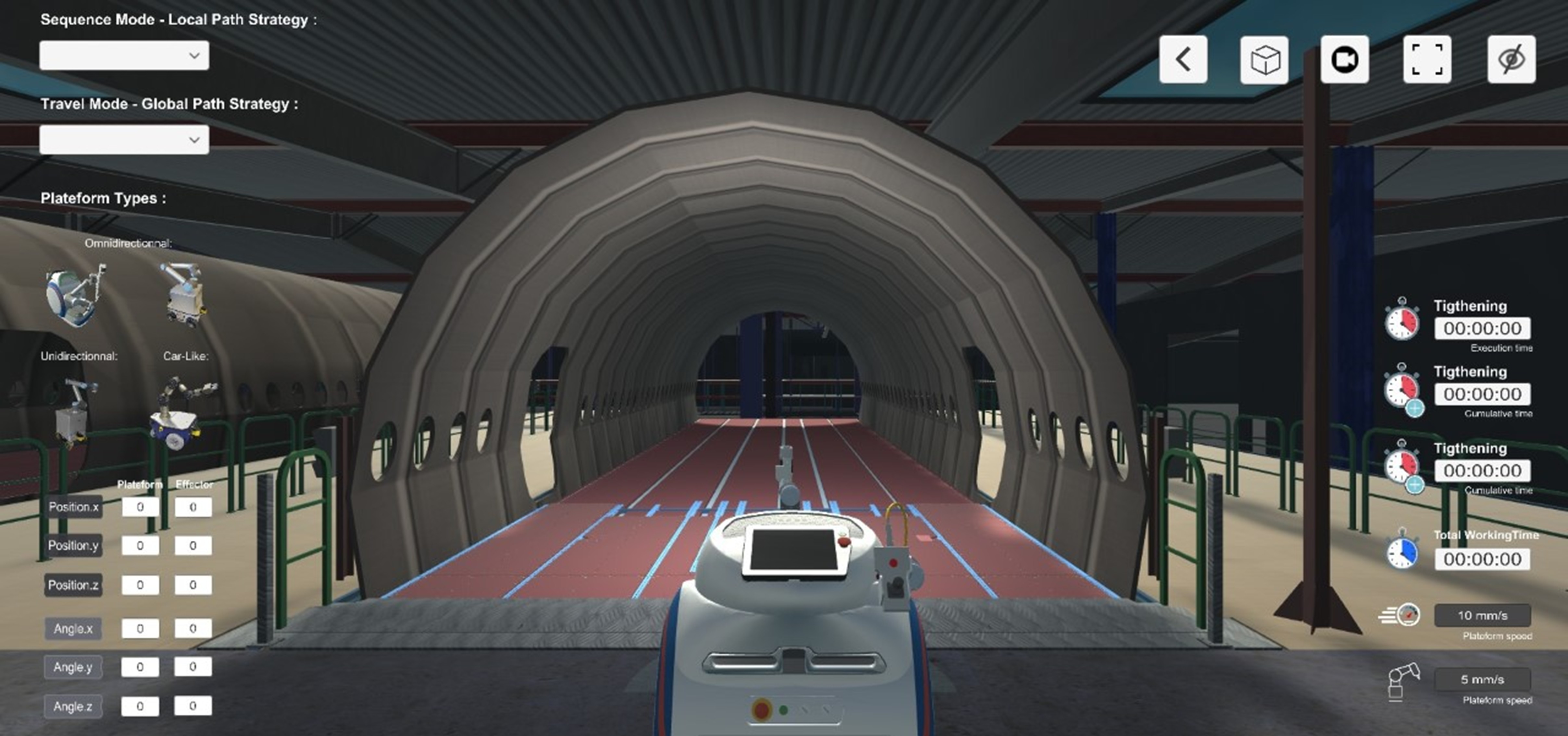
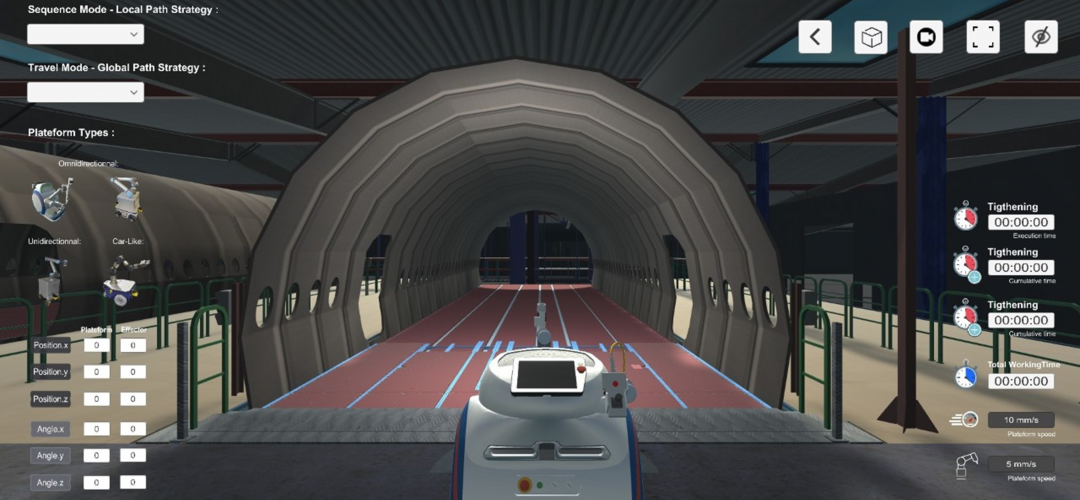
The research project proposed here is the CIAO project, an R&T project developed in-house at Airbus Opération SAS. The aim is to set up a collaborative platform for autonomous movement using two laser scanners (radar sick) to locate and avoid positive or negative obstacles. The platform is equipped with a UR10 arm on which a pneumo-electric screwdriving head and a camera-based vision system are implemented, capable of detecting and repositioning the arm to ensure that the screw tightening operation is carried out correctly.
The aim of this project is to contribute to the automation of data acquisition and enrichment for simulation, and to simulate robot trajectories in 3D as a function of the operations to be carried out and the constraints linked to its environment. This project also aims to simulate in virtual reality the perception of sensors and the behaviour of controllers, so as to be able to define reactions as expected, according to different types of hazard. The various prediction methods (machine-learning and deep-learning) will enable these behaviours to be automated, particularly for unidentified behaviours.
3D and CAD contents
Digital drawing content
Description about AI and Neural Network Arts
Copyright © 2025. All rights reserved.